
When considering driverless cars, the discussion can quickly take a turn to something of an ethical black hole where any argument, despite validity, will descend into nothing more than a circular discussion. While this can be a productive exercise in debate, it often neglects the realities of the space that is driverless cars. This space is quite nuanced with different levels of self-driving needing to be considered.
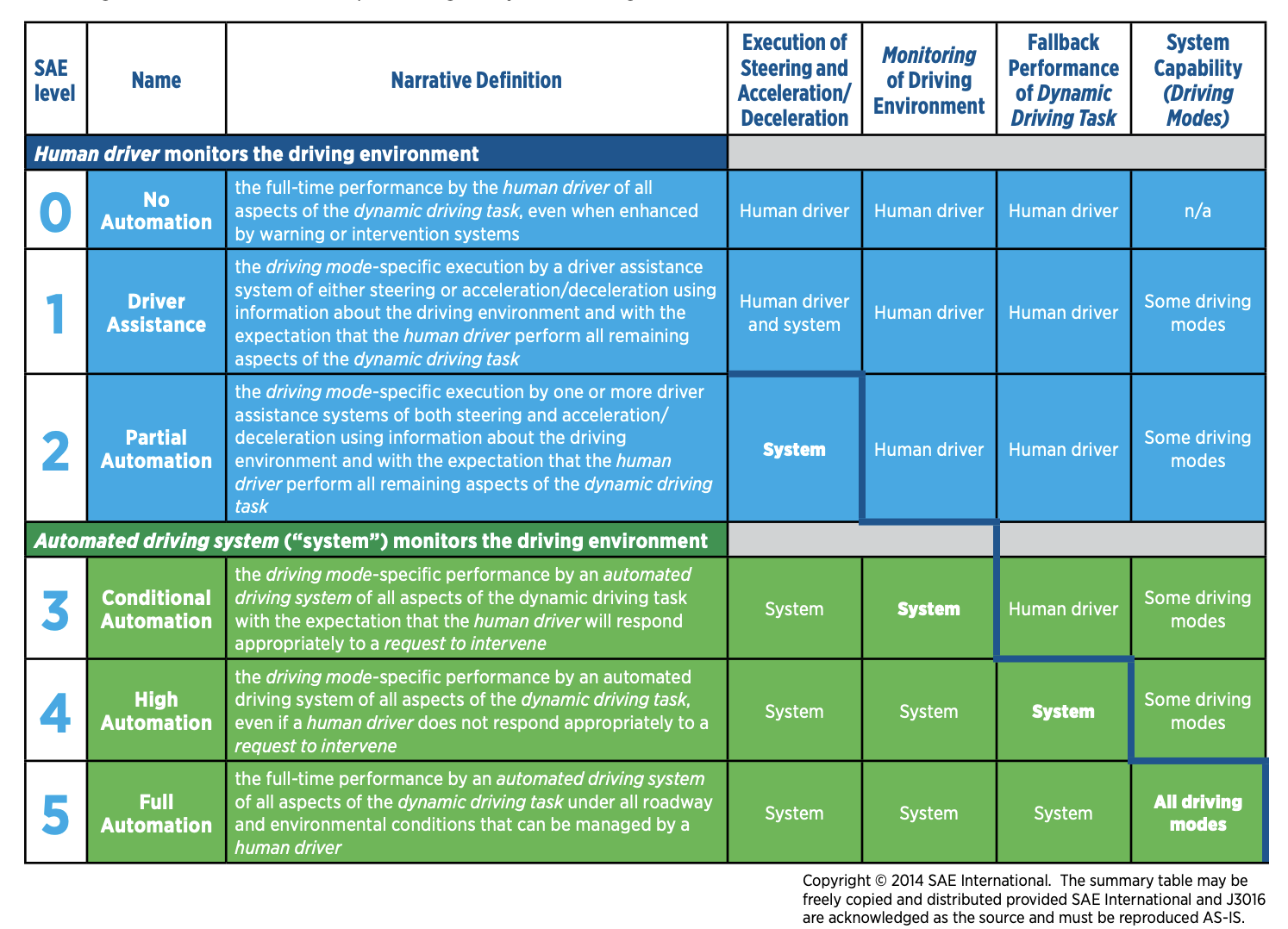
As explained in SAE International’s Automated Driving: levels of driving automation, there are six defined levels that comprise the space form user-operated to fully autonomous. There are a series of categories that may explain the levels of self-driving. In this relatively brief post, I hope to provide you with enough information on them to complement your present understanding.
Level 0: This is what, for most of history, has been the traditional car. This includes the model-t of our ancestors to the present-day car with nothing more than the manual controls.
From level 0, we can begin to grow out. However, we must acknowledge a group of characteristics that define self-driving. Those are the execution of steering and acceleration, the active monitoring of the driving environment, the ability to be the fallback in driving performance, and autonomy driving.
Level 1: This is not far from level 0 and begins to introduce more tools for cruise control and possible indicators for the blind spot.
Level 2: This is the level that most people are beginning to find in everything from the low-end car to the high. Known as adaptive cruise control and lane-stay, this will keep a driver in their lane. This covers the first category of controlling steering and acceleration but can not control all of it.
Level 3: This is the beginning of the automation spectrum with the driver taking what could be called a back-seat to the system. The driver will not have to do anything unless it is a situation where the system cannot understand. This could be an unmapped area or an area that confuses the model on which the system operates.
Level 4: This is begging to be the brink of full automation. In theory, a driver could sleep and the fallback control of the system would be prepared to handle a difficult situation without having human intervention.
Level 5: This, finally, is what most people imagine when they think of driverless vehicles. A car that can, alone, drive for itself. It no longer needs the operation of a human and could navigate the roadways as an individual - free of reliance on humans.
With an understanding of these levels, many of the questions that arise when considering driverless cars should be revisited. Such as:
- Can all of the autonomy levels be open source?
- Should these systems be acknowledged as a public good and shared?
- Who regulates each of these levels and when is regulation needed?
While I would like to go into these now, I don’t have time for an entire thesis and they will have to wait for a future post.